Spencer
Metoda Spencera jest metodą paskową utworzoną na bazie równowagi granicznej. Wymagane jest tu spełnienie równowagi sił i momentów oddziaływujących na poszczególne bloki. Bloki tworzone są poprzez dzielenie gruntu powyżej powierzchni poślizgu, za pomocą płaszczyzn podziałowych. Siły oddziaływujące na poszczególne bloki pokazane są na rysunku poniżej.
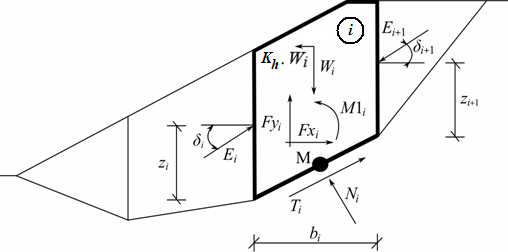 Schemat statyczny - metoda Spencera
Schemat statyczny - metoda Spencera
Przyjmuje się, że dla każdego z bloków zastosowanie mają podane poniżej siły:
Wi | - | ciężar bloku , zawierający dodatkowe obciążenie materiałowe o charakterze ciężaru ujmujące wpływ wspóczynnika Kv pionowego trzęsienia ziemi |
Kh.Wi | - | pozioma siła inercji reprezentująca efekt trzęsienia ziemi; Kh jest współczynnikiem przyspieszenia poziomego podczas trzęsienia ziemi |
Ni | - | siła normalna na powierzchni poślizgu |
Ti | - | siła tnąca na powierzchni poślizgu |
Ei ,Ei+1 | - | siły wywierane sąsiadującymi blokami, nachylone od płaszyzny poziomej pod kątem δ |
Fxi,Fyi | - | inne siły poziome i pionowe oddziaływujące na blok |
M1i | - | moment sił Fxi Fyi obracających się wokół punktu M, który jest środkiem segmentu i-tego powierzchni poślizgu |
Ui | - | wypadkowa ciśnienia porowego na segmencie i-tym powierzchni poślizgu |
W metodzie Spencera, dla wyliczenia równowagi granicznej sił i momentów dla poszczególnych bloków, przyjmowane są podane poniżej założenia:
- Płaszczyzny podziału między blokami są zawsze pionowe
- Linia oddziaływania ciężaru bloku Wi przechodzi przez środek segmentu i-tego powierzchni poślizgu, reprezentowany jako punkt M
- Siła normalna Ni oddziaływuje w środku segmentu i-tego powierzchni poślizgu, w punkcie M
- Nachylenie sił Ei oddziaływujących między blokami jest stałe dla wszystkich bloków i wynosi δ; tylko na punktach końcowych powierzchni poślizgu δ = 0
Dla uzyskania rozwiązania stosuje się następujące równania:
| (1) |
| (2) |
| (3) |
| (4) |
| (5) |
gdzie: | φi | - | kąt tarcia wewnętrznego gruntu na odcinku powierzchni poślizgu |
ci | - | spójność gruntu na odcinku powierzchni poślizgu | |
αi | - | nachylenie odcinka powierzchni poślizgu |
Równanie (1) przedstawia zależność między efektywną i całkowitą wartością siły normalnej oddziaływującej na powierzchnię poślizgu. Równanie (2) odpowiada warunkom Mohr-Coulomba, przedstawiając zależność między siłami normalnymi i tnącymi dla danego segmentu powierzchni poślizgu. Równanie (3) jest to równanie równowagi sił, po kierunku normalnym do segmentu i-tego powierzchni poślizgu, a równanie (4) przedstawia równowagę wzdłuż segmentu i-tego powierzchni poślizgu. SF jest współczynnikiem bezpieczeństwa, stosowanym dla redukcji parametrów gruntu. Równanie (5) odpowiada równaniu równowagi momentów wokół punktu M, gdzie ygi jest współrzędną pionową punktu przyłożenia wagi bloku, a yM jest współrzędną pionową punktu M. Modyfikacja równań (3) i (4) daje nam podane poniżej wzory rekursywne:

Powyższy wzór pozwala na wyznaczenie wszystkich sił Ei oddziałujących pomiędzy blokami dla danych wartości δi oraz SF. Rozwiązanie to zakłada, że w punkcie początkowym powierzchni poślizgu wartość E jest znana i wynosi E1 = 0.
Dodatkowy wzór rekursywny uzyskujemy z równania równowagi momentów (5), w postaci:
![]()
Ten wzór pozwala na obliczenie, przy danych wartościach δ, wszystkich ramion z sił oddziaływujących między blokami, znając wartość po lewej stronie na początku płaszczyzny poślizgu, gdzie z1 = 0.
Współczynnik bezpieczeństwa SF wyznaczany jest za pomocą podanego poniżej procesu iteracyjnego:
- Wartość początkowa δ ustawiona jest na zero, δ = 0.
- Współczynnik bezpieczeństwa SF dla danej wartości δ wynika z równania (6), jeśli przyjmiemy wartość En+1 = 0 na końcu powierzchni poślizgu.
- Wartość δ określana jest z równania (7), korzystając z wartości E wyznaczonych w uprzednim kroku, przy wymaganiu zerowego momentu na ostatnim bloku. Z równania (7) nie wyznacza się wartości zn+1 ponieważ jest ona równa zeru. Dla tej wartości musi być spełnione równanie równowagi momentów (5).
- Następnie powtarzane są kroki 2 i 3, dopóki wartość δ nie przestanie się zmieniać.
Aby uzyskać stabilny proces iteracji, konieczne jest unikanie niestabilnych rozwiązań. Takie niestabilności pojawiają się w miejscach, gdy zachodzi dzielenie przez zero w równaniach (6) i (7). W równaniu (7) dzielenie przez zero występuje dla δ = π/2 lub δ = -π/2. Tak więc, wartość kąta δ musi się zawierać w przedziale (-π/2 ; π/2).
Dzielenie przez zero w wyrażeniu (6) pojawia się gdy:
![]()
Innym sprawdzeniem zapobiegającym niestabilności numerycznej jest weryfikacja parametru mα - musi być spełniony podany poniżej warunek:
![]()
Tak więc, przed wykonaniem iteracji, wymagane jest znalezienie najwyższych wartości krytycznych (SFmin) spełniających wyżej podane warunki. Wartości poniżej wartości krytycznej SFmin znajdują się w obszarze niestabilnych rozwiązań, tak więc iterację rozpoczyna się od ustawienia wartości SF na wartość "tuż" powyżej SFmin, a wszystkie wartości wynikowe SF z iteracji są wyższe niż SFmin.
Należy zwrócic uwagę na fakt, że metody rygorystyczne konwergują znacznie gorzej niż metody prostsze (Bishop, Fellenius). Problemy z konwergencją mogą wystąpić, np. w przypadku wystąpienia zbyt stromych odcinków powierzchni poślizgu, skomplikowanej geometrii, czy znaczących, gwałtownych przyrostów obciążeń. Jeśli wynik nie zostanie uzyskany zaleca się drobną korektę wprowadzonych danych, np. zdefiniowanie mniej stromej powierzchni poślizgu, zdefiniowanie większej liczby punktów definiujących powierzchnię poślizgu. Innym rozwiązaniem może być zastosowanie prostszej metody obliczeniowej.
Literatura:
Spencer, E. 1967. A method of analysis of the stability of embankments assuming parallel interslice forces. Géotechnique, 17(1): 11-26.