Lineární stabilita
Nedílnou součástí návrhu štíhlých prutových konstrukcí by měl být společně se statickým výpočtem také výpočet stabilitní, neboť podává z inženýrského hlediska řadu důležitých informací o možném chování navrhované konstrukce. Vztah mezi zatížením, které v daném okamžiku na konstrukci působí a zatížením kritickým, vedoucím ke ztrátě stability, je jedním z výstupů stabilitního výpočtu. Vlastní tvar vybočení potom dává jednak velmi dobrou představu o možném mechanismu porušení konstrukce ztrátou stability a zároveň umožňuje odhadnout charakter geometrických imperfekcí, které jsou pro uvažovanou konstrukci nebezpečné. Současná verze programu Fin 3D poskytuje uživateli nástroj, jak se v těchto problémech lépe orientovat.
Úlohu lineární stability lze charakterizovat jako problém určení kritické hodnoty zatížení ideální konstrukce jako násobek zatížení, které na tuto konstrukci skutečně působí. Za tím účelem je nutno zapsat podmínky rovnováhy na deformované konstrukci a zahrnout tak vliv normálových sil na příčnou tuhost prutových prvků. Rovnice rovnováhy pak přejde na tvar
![]()
kde je: | K |
|
Kσ |
| |
r |
|
Podobně jako vlastní tvary kmitání je i vlastní tvar vybočení normován, přičemž normované hodnoty uzlových deformací se nezobrazují. Výše uvedená rovnice je obdobou rovnice popisující vlastní tvary kmitání. Na rozdíl od vlastního kmitání nás však zajímá pouze nejnižší vlastní číslo rovnice, které označíme jako λkrit . Předpokládáme-li, že hodnota zatížení rozloženého po konstrukci odpovídá vektoru uzlových sil R, potom vektor
![]()
odpovídá hodnotě kritického zatížení vedoucí ke ztrátě stability celé konstrukce. Pokud vyjde λkrit záporné, je konstrukce stabilní a ke ztrátě stability by došlo v okamžiku přenásobení stávajícího zatížení hodnotou (-1).
Metoda iterace podprostoru a metoda Lanczosova
Podobně jako problém vlastního kmitání vede i zde rovnice na obecný problém vlastních čísel. K jeho řešení lze použít jak metodu iterace podprostoru tak metodu Lanczosovu. Metoda Iterace podprostoru byla upravena tak, aby bylo možno řešit konstrukce, ve kterých se vyskytují jak tažené, tak tlačené prutové prvky. Naproti tomu Lanczosova metoda je v tomto ohledu více konzervativní a vyžaduje, aby matice počátečních napětí byla pozitivně definitní. Jinými slovy umožňuje řešit pouze ty konstrukce, ve kterých se při daném zatížení vyskytují jen tlačené nebo zcela nezatížené prvky. Vzhledem k tomu, že výhody i nevýhody obou metod jsou podrobně popsány v předcházející kapitole, nebudeme se k nim v tomto odstavci blíže vyjadřovat.
Metoda inverzní matice
Jak jsme se již zmínili, naším cílem je nalézt nejnižší vlastní číslo rovnice. Jednou z nejznámějších metod, která je výhradně určena k řešení tohoto problému je metoda Inverzní iterace a v programu Fin 3D doplňuje skupinu výše uvedených metod určených k řešení stabilitních problémů konstrukcí. Jak je již patrné z názvu je metoda inverzní iterace metodou iterační. Jedná se o metodu poměrně spolehlivou a přesnou v tom smyslu, že opakováním iteračního cyklu se může s libovolnou přesností (omezenou přesností počítače) přiblížit ke správnému řešení. Bohužel v některých případech je rychlost konvergence velice pomalá a maximální počet možných iterací, který je podobně jako u vlastního kmitání roven 200, nemusí být vždy postačující. Proto je výstup výpočtu doplněn o informaci týkající se dosažené přesnosti. V případě, že konvergence nebyla dosažena má uživatel možnost buď zvýšit počet iterací, nebo snížit požadovanou přesnost, anebo zvolit jinou metodu.
Doporučení
Vzhledem k tomu, že na rozdíl od běžného výpočtu lineární statiky neplatí v lineární stabilitě princip superpozice, provádí se výpočet pouze pro zvolený počet předem definovaných kombinací. Ve výsledcích je potom každá kombinace charakterizována kritickým násobkem zatížení λkrit (ve výsledcích je koeficient λkrit označen jako fkrit ) a vlastním tvarem vybočení. Přitom pro každou kombinaci charakterizovanou skutečným zatížením by měla být hodnota součinitele λkrit větší než 4. V opačném případě by se měl projektant vážně zamyslet nad statickým návrhem konstrukce a statický model buď přeformulovat anebo uvažovat o možných konstrukčních úpravách.
Dalších pár poznámek je věnováno rozdílu výpočtu prostorových a rovinných konstrukcí. Uživatel by si měl být vědom skutečnosti, že rovinná konstrukce v rovině zatížená má tendenci vybočit z roviny konstrukce. Pokud je vybočení z roviny konstrukce zabráněno, je kritický násobek zatížení λkrit výrazně vyšší než když tomu tak není. Tato skutečnost je demonstrována na příkladu jednoduchého rovinného rámu jehož stojky jsou zatíženy v rovině rámu osovými silami. Výsledek je patrný z následujícího obrázku. V prvním případě se jedná o prostorové vybočení. Ve druhém případě bylo vybočení z roviny rámu zabráněno a λkrit se zvýšilo více než čtyřikrát.
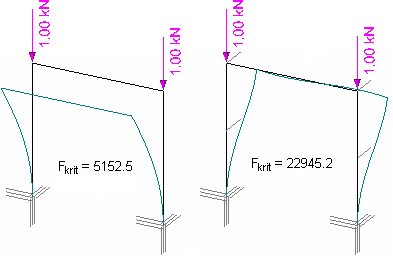 Porovnání vybočení z roviny a v rovině
Porovnání vybočení z roviny a v rovině
Na závěr jen pár slov k výpočtu vzpěrných délek. Vzhledem k tomu, že se jedná o poměrně komplikovaný problém a žádný obecný recept neexistuje, jsou uživatelé v tomto směru odkázáni na inženýrský cit, praxi a zdravý rozum. Pokud se však uživatel nevyhne práci se vzpěrnými délkami , poskytuje stabilitní výpočet vstup pro jejich jednoduchý odhad. Pokud se v konstrukci vyskytují pruty, které jsou výrazně namáhány na vzpěr, lze při výpočtu vzpěrných délek postupovat následujícím způsobem: V prvním kroku určíme statickým výpočtem průběh normálových sil po konstrukci. V druhém kroku pak odhadneme hodnotu λkrit a určíme průběh normálových sil odpovídající hodnotě kritického zatížení ze vzorce
![]()
kde je: | N |
|
K odhadu vzpěrné délky v uvažovaném průřezu pak použijeme klasický Eulerův vzorec pro kritické břemeno ve tvaru
![]()
kde je: | lh |
|
EI |
| |
Nkrit |
|
Upozorňujeme, že tento vzorec byl odvozen za předpokladu osově zatíženého přímého prutu. Jeho použití pro odhad vzpěrných délek obecně zatížené konstrukce by proto mělo být podřízeno důkladné analýze, přitom oblast použití výše uvedeného vzorce by se měla týkat pouze té části konstrukce, ve které jsou jednotlivé prvky výrazně tlačené a svým charakterem odpovídají chování osamělého přímého prutu. Na obr níže této skutečnosti odpovídá prut 3, přitom pruty 1 a 2 pouze suplují pružné uložení horního styčníku prutu 3 a jejich posouzení na vzpěr je bezpředmětné. Jak je vidět, vzhledem k prutu 3 se rám chová jako pružně uložená konzola. Proto také výpočet vzpěrných délek na prutech 1 a 2 by byl nesmyslný.
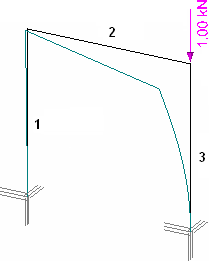 Příklad osově zatíženého prvku
Příklad osově zatíženého prvku
Závěrem chceme jen poznamenat, že stabilitní posouzení chování štíhlých prutových konstrukcí není problém triviální a měla by se mu věnovat dostatečná pozornost.